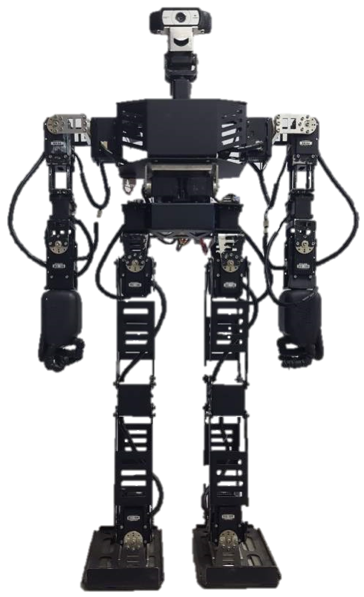
Kid Size Robot: Liquid Motion

|
|
Awards
FIRA 2019 HuroCup Kid AR 2nd Place
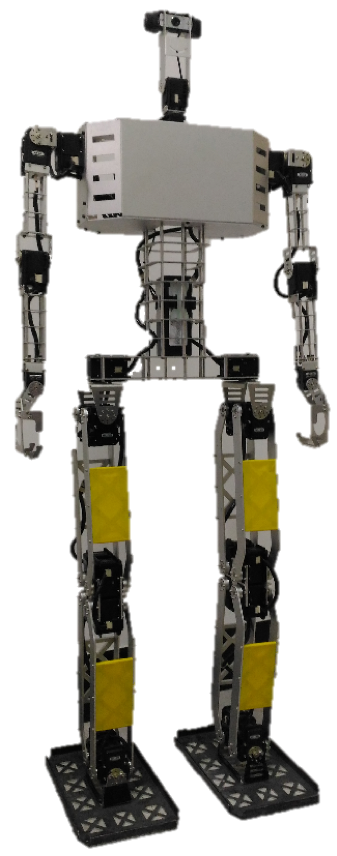
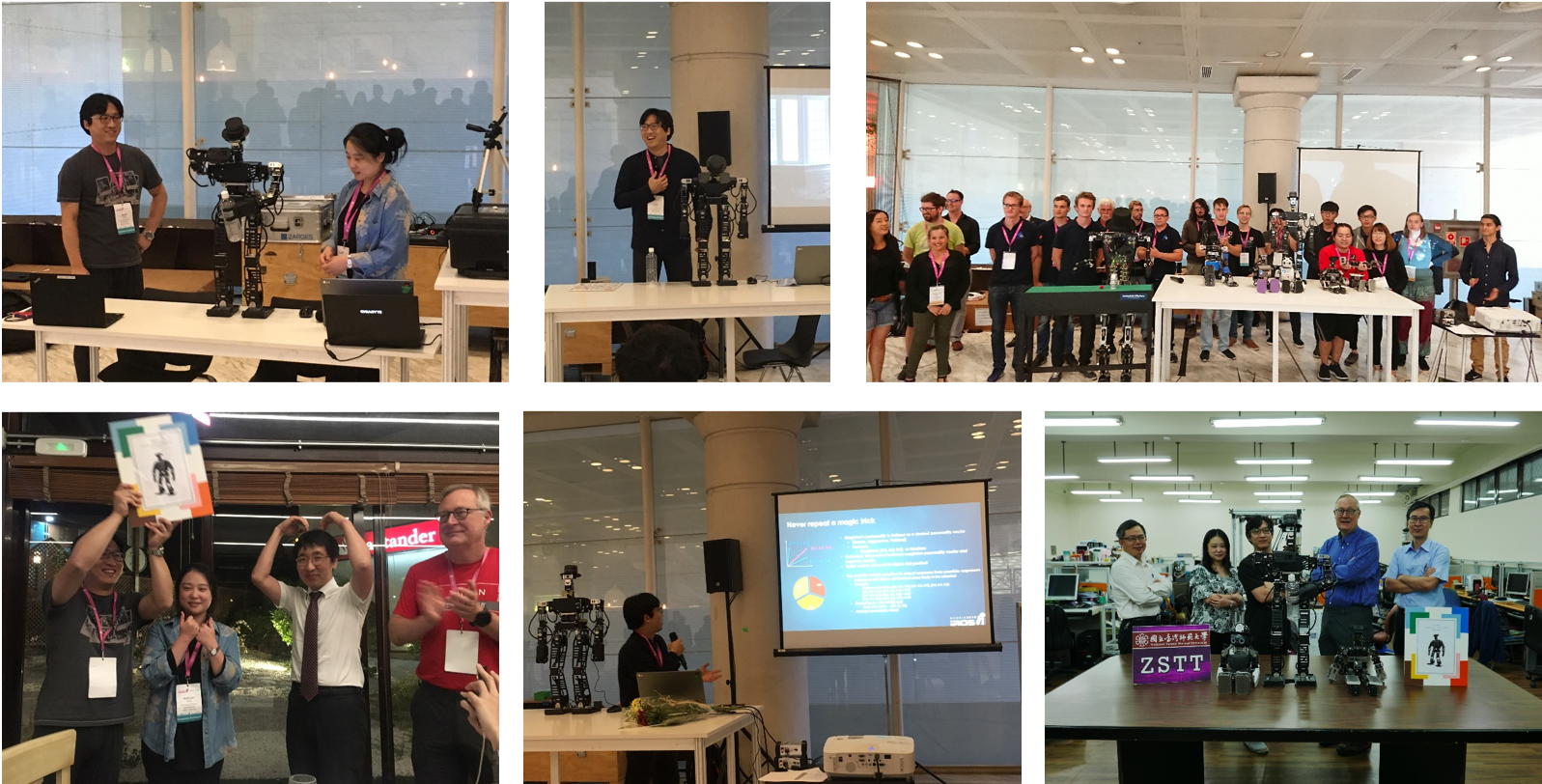
Teen Sized Robot: ZSTT-NTNU
|
|
Awards
FIRA 2019 HuroCup All-Round 1st Place
IROS 2018 Robot-Magic 1st Place
IROS 2018 Robot-Magic 1st Place
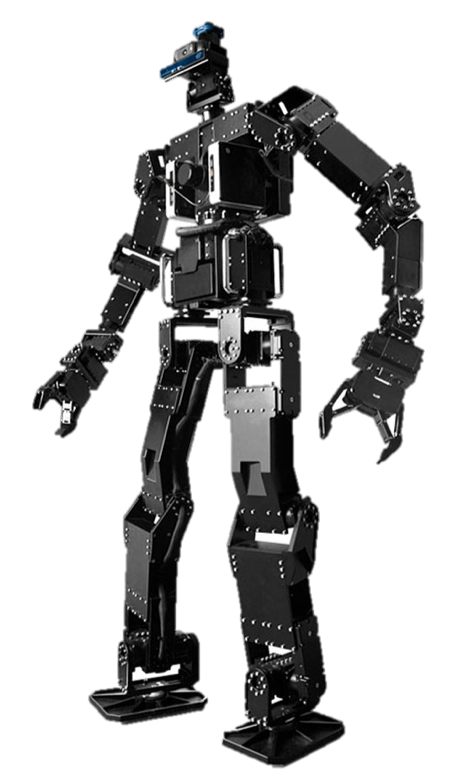
Adult Size Robot: ZSTT-NTNU
|
|
Awards
RoboCup 2018 Humanoid League Technical Challenge 3rd
Thormang 3
|
|
Awards
IEEE IROS HAC 2019 - Robot Magic and Music 1st
FIRA Roboworld Cup

|

|
|

|

|

|
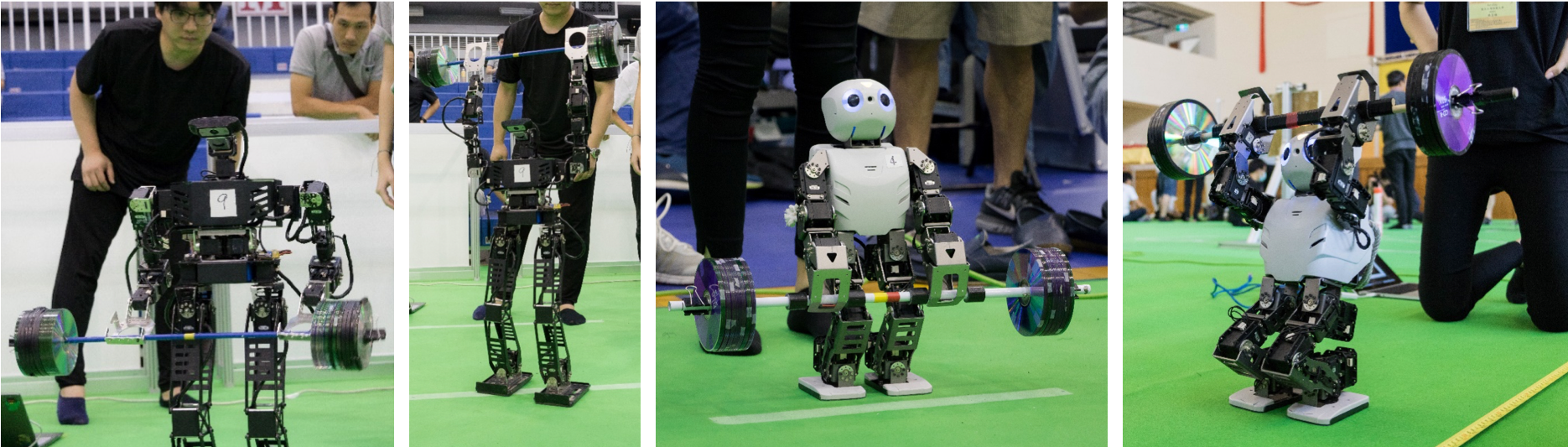
FIRA HuroCup:
Weightlifting
- Active balancing
- Heavy load
- Adjust for change in center of gravity
FIRA HuroCup:
Sprint
Run as fast as possible 3m forward, then 3m backwards
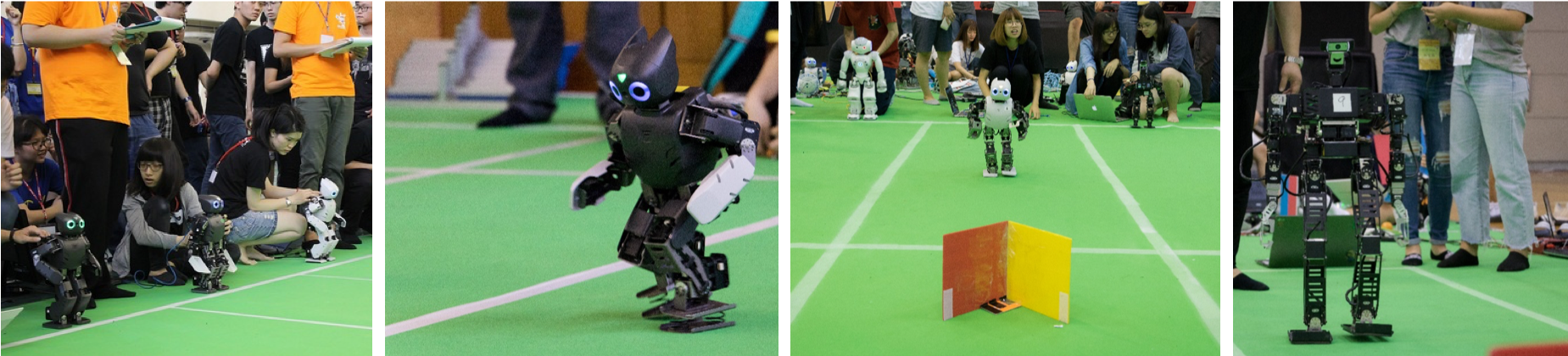
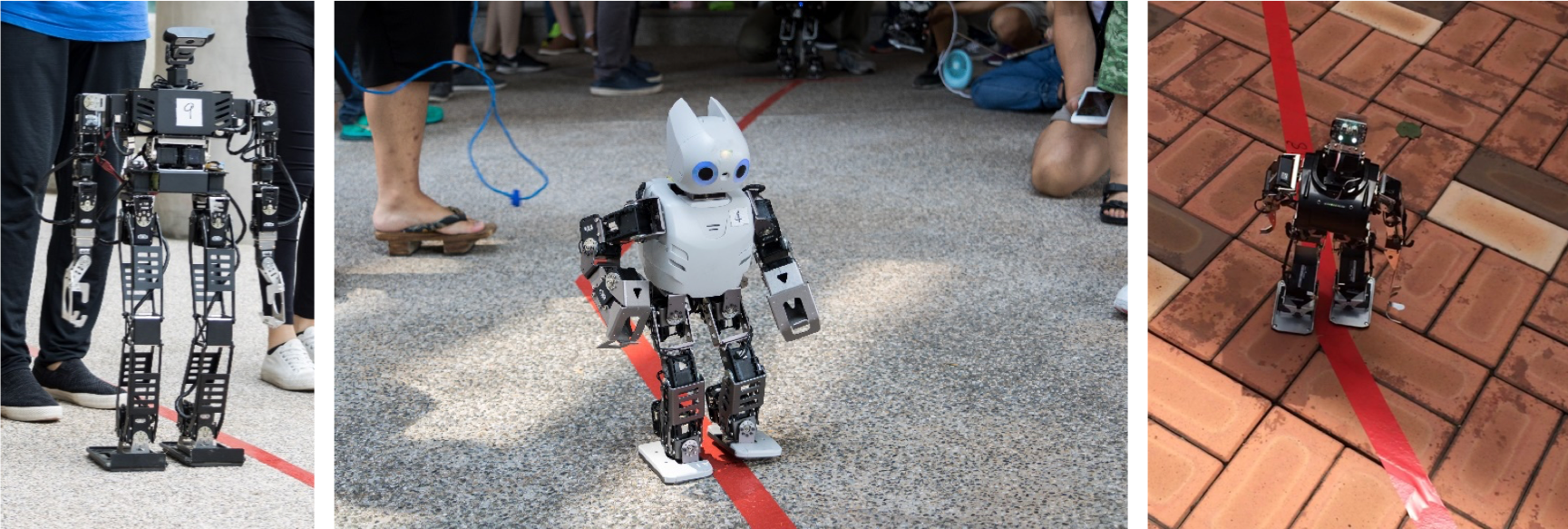
FIRA HuroCup:
Marathon
- Endurance race 425m
- Robot follows track and markers
- Advanced vision challenge
FIRA HuroCup:
Basketball
Manipulation and control of small objects
More difficult than kicking a ball - No second chance
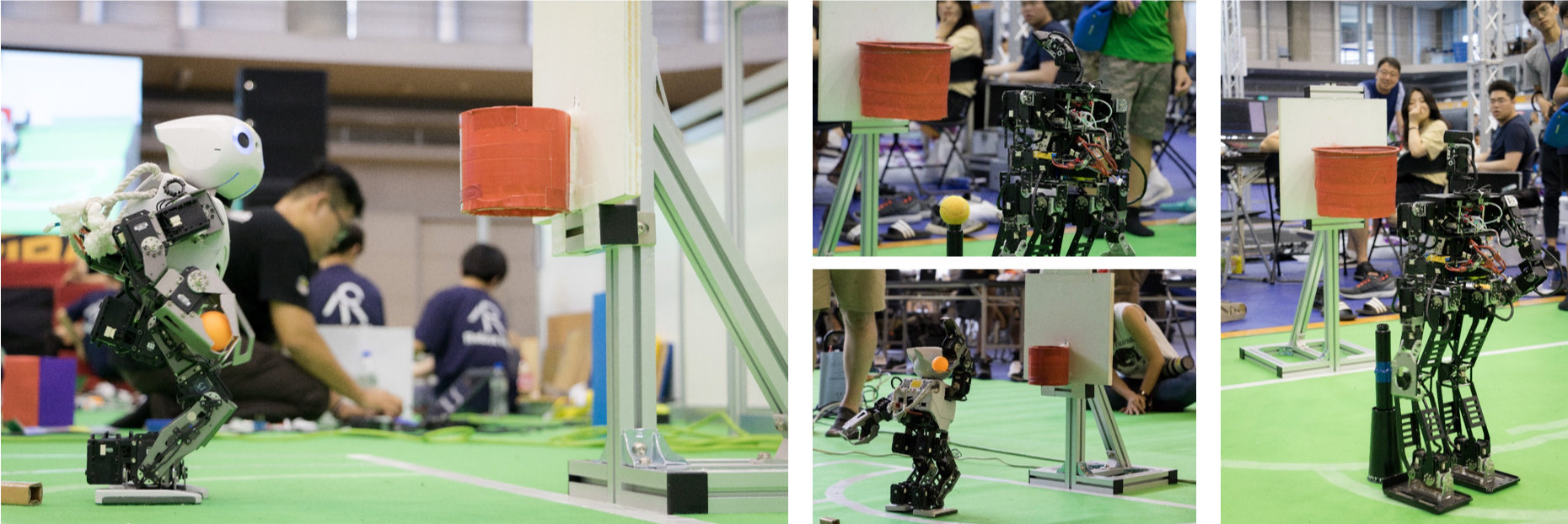
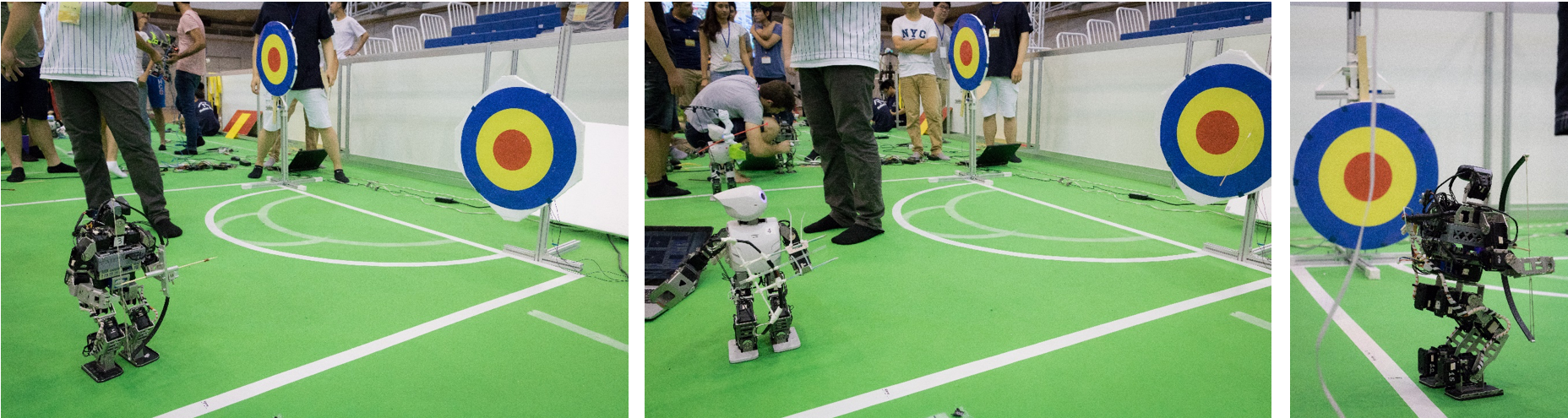
FIRA HuroCup:
Archery
Highly accurate motion planning and force control
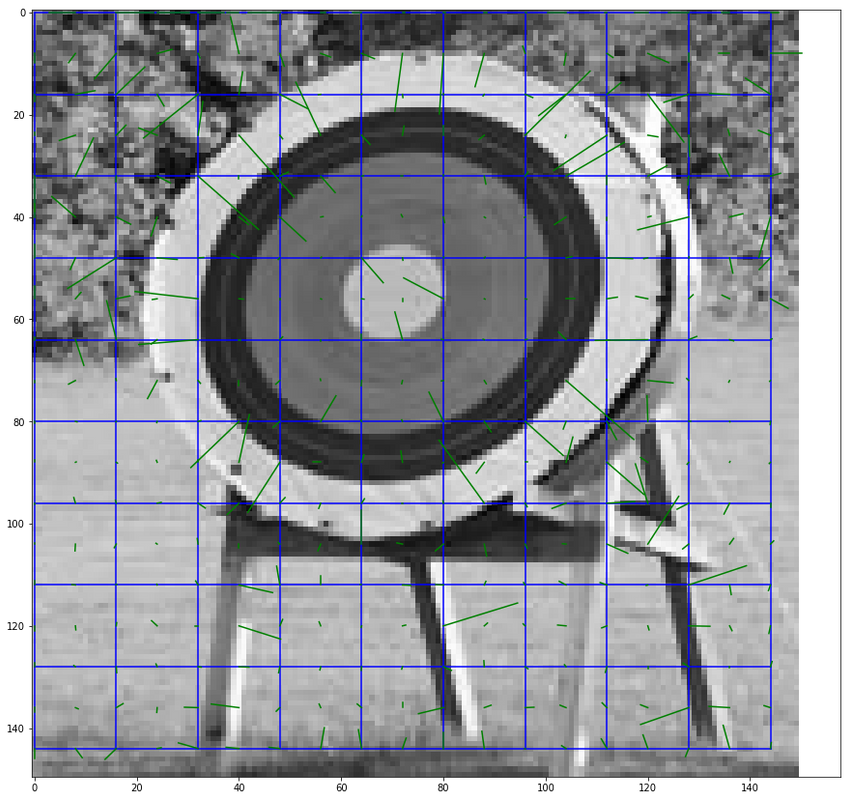
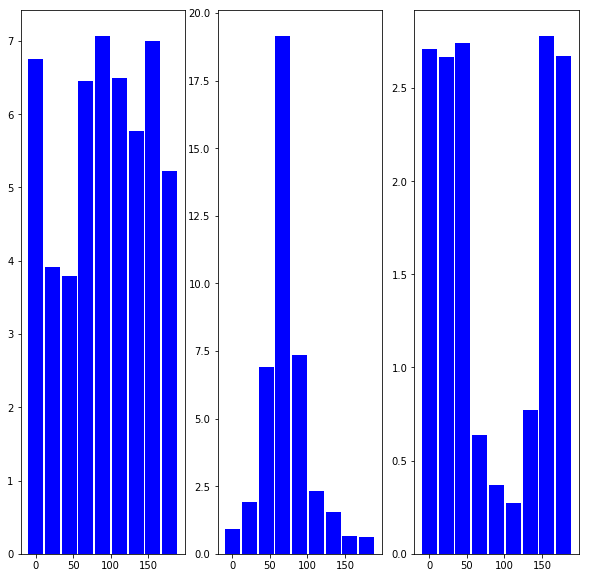
Robot Archery: Target Detection
Detection based on HOG features
Learn classifer (SVM) from training data
|
|
ERC Competition
IROS Humanoid Application Challenge - Robot Magic
|

|
IROS Robot Magic
Programming by Demonstration - Dr. Eureka
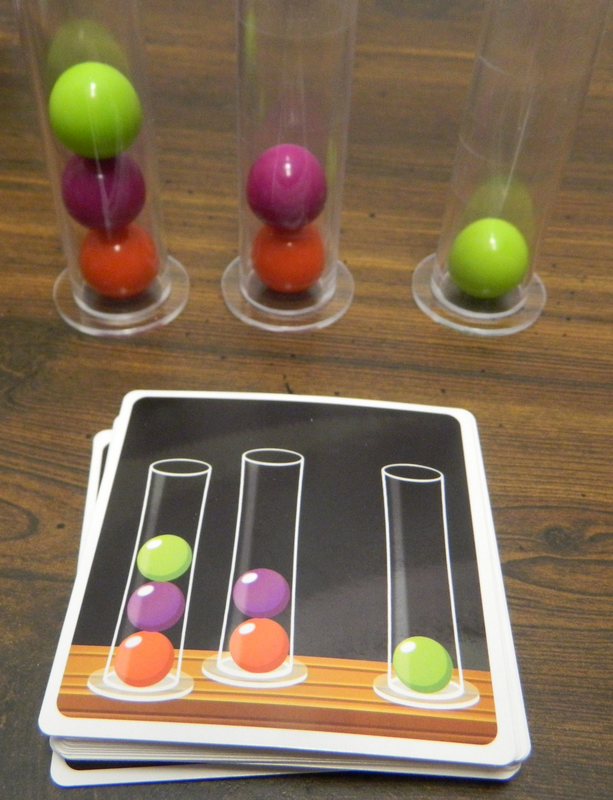
Dr. Eureka game is a logic game for children and adults.
|
Each player has three clear tubes.
|
|
|
A challenge card is drawn and the players then have to create the configuration shown on the card. Players can only pour balls from one tube into another. |
|